用于动态系统状态检测的抽吸式血栓切除系统和方法与流程-ag尊龙凯时
本公开总体上涉及医疗装置和方法的领域。更具体地,本文描述的具体实施方式涉及用于控制通过抽吸式血栓切除术从患者的脉管系统去除凝块的装置和方法。
背景技术:
1、中风是残疾和死亡的重要原因,并且是全球医疗保健中日益严重的问题。仅在美国,每年就有超过70万人中风,其中超过15万人死亡。在中风幸存者中,大约90%的人会遭受从轻微到严重的长期运动、感觉、记忆或推理损伤。美国医疗保健系统每年的总成本估计超过500亿美元。
2、中风可由血栓栓塞引起的脑动脉阻塞(称为“缺血性中风”)或由脑动脉破裂(称为“出血性中风”)引起。出血性中风会导致颅骨内出血,限制脑细胞的血液供应,并对脆弱的脑组织造成有害的压力。失血、肿胀、脑组织突出以及导致颅骨内形成凝块的血液淤积都会迅速破坏脑组织。出血性中风是一种危及生命的医疗紧急情况,治疗选择有限。
3、除了脑中风之外,在动脉和静脉循环中的整个脉管系统的血栓栓塞是许多常见的危及生命的病症的特征。由血栓闭塞引起的潜在致命疾病的示例包括肺栓塞、深静脉血栓形成和急性肢体缺血。急性肺栓塞是美国的一个重要死因,每年约有30万名患者死亡。肺栓塞可能是深静脉血栓形成的并发症,60岁及以上患者的年发病率为1%。所有上述疾病都是治疗可以包括抽吸或排出凝块和/或血液的病症的示例。
4、特别令人感兴趣的是,penumbra机械血栓切除术系统是专门为通过抽吸进行机械血栓切除术而设计的完全集成的系统。它适用于颅内大血管闭塞继发的急性缺血性中风患者的血运重建。系统是专为外周和冠状脉管系统设计的类似系统,也是一种机械血栓切除抽吸系统,专为外周脉管系统血栓闭塞患者的血运重建而设计。penumbra系统和indigo系统在提交本临时专利申请时均可在商业上获得,并且包括抽吸或再灌注导管、抽吸管道、其他配件和抽吸泵(以如下商品名出售:pump maxtm抽吸泵或penumbra enginetm抽吸泵)以用于连接抽吸管道和抽吸导管。如图1所示,pump maxtm抽吸泵10包括基部单元12,该基部单元封装有离线电压操作的真空泵(未示出)。基部单元具有通断开关14和用于调节泵提供的真空水平的单独旋钮16。真空水平可以在压力计18上读取。血液和凝块从抽吸管路22(以虚线示出)被吸入收集罐20,抽吸管路22连接到再灌注导管(未示出),该再灌注导管已经被引入到患者的脉管系统以抽出凝块。血液和凝块通过部分真空被吸入收集罐中,该部分真空由连接到真空泵(未示出)的基部单元12上的真空连接器28提供。来自真空连接器28的真空被施加到可移除盖26上的真空端口24。真空连接器28通过外部真空管路30连接到真空端口24。
5、尽管非常有效,但是由于患者失血过多的风险,尤其是在使用大抽吸导管时,有时必须终止使用indigo系统机械血栓切除装置或其他类似的真空辅助血栓切除系统的凝块抽吸。在抽吸式血栓切除术期间,当导管端头脱离与血栓或其他闭塞物质的接触时,端头会暴露于健康血液并随后发生充分流动。在这种情况下,失血率过高,在某些情况下,可能会导致手术提前终止。在具体实施方式中,在手术过程中,当导管进入健康血液并随后发生充分流动时,对于8弗伦奇尺寸的导管,失血率在每秒20-25cc的范围内。最大可容忍失血量为300-1000ml,导管在不受限制模式下运行的时间不得超过约20至50秒。当医生手动操作系统时,在去除足够的凝块之前,总失血量可能达到不可接受的水平。此外,可靠地识别导管端头是否与凝块接触或是否意外地吸入健康、无凝块的血液是一个重要的问题,并且这种手动控制并不是最佳的。
6、在使用半影系统的其他手术期间,例如用于治疗缺血性中风的神经血管手术中,过度去除血液的风险可能较小,并且手术的主要焦点可以是最大化去除闭塞物质。优化技术和抽吸控制对于成功去除闭塞物质至关重要。
7、因此,需要提供改进的方法和设备,以用于使用抽吸导管与泵送控制台相结合来控制血栓和凝块的抽吸。提供在这种抽吸过程期间限制失血的系统和方法将是特别有用的,例如通过在抽吸导管不与凝块或血栓接触时自动停止抽吸。另外,期望提供优化系统性能的系统和方法,以及用于去除闭塞物质的程序。这些目标中的至少一些目标将通过下文描述的具体实施方式来实现。
8、在提交本临时专利申请时,penumbras在商业上可获得,在题为“scienceof aspiration:the penumbraapproach”的小册子中进行了描述。相关专利和专利出版物包括:us4574812;us5624394;us6019728;us6283719;us6358225;us6599277;us6689089;us6719717;us6830577;us8246580;us8398582;us8465467;us8668665;us9248221;us2003/0050619;us2010/094201;us2014/323906;us2014/276920;us2016/0220741;us2017/0238950;us2017/049470;wo2014/151209;以及wo2010/045178。
技术实现思路
1、本文描述的具体实施方式提供了通过实现更长的手术、通过增强闭塞物质的摄入或两者来改进导管抽吸的系统和方法。在具体实施方式中,监测在真空抽吸下流经抽吸导管的流体量以确定流动是否不受限制、受限制或堵塞。根据所确定的流动状态,具体实施方式可以采用不同的技术和方法来改进导管抽吸。在具体实施方式中,检测到不受限制的流动,并且出于节省血液的目的而自动且暂时地限制抽吸。这可以有利地延长可用于执行手术的时间,从而允许更完全地去除闭塞物质。在另一个实施方式中,检测到受限制的流动,并自动应用全真空抽吸。在又一具体实施方式中,检测堵塞的导管,并且自动施加脉冲抽吸。这可以有益地增强大的、坚硬的或其他麻烦的闭塞物的摄取。替代性地,具体实施方式的用户可以根据需要应用脉冲抽吸、完全抽吸或受限制的抽吸。
2、在一个具体实施方式中,所描述的系统和方法通过动态提取循环解决了过度失血的问题。监测由抽吸导管提取的物质的性质和流动性,以便系统可以在凝块中时允许连续抽吸,或者对提取速率进行采样以确定导管的端头是否与凝块接触,以便降低失血过多的风险。虽然在下面的示例性实施方式中公开了血液流速的确定和监测,但是也可以使用抽吸流出物的流动性和/或结构组成的其他测量,例如监测收集室的体积、监测收集室的填充速率、视觉上监测抽吸管道(凝块比新鲜血液颜色更深),或在抽吸管道上放置应变计。
3、具体实施方式的系统和方法可以在亚秒时间范围内响应流速、压力、压差或抽吸导管内部或邻近抽吸导管的物质成分的其他指标的变化,以限制不必要的在血栓切除术过程中抽吸血液。具体实施方式可用于任何血栓切除术、栓子切除术、粥样斑块切除术或其他导管或探针系统,其中通过向任何再灌流、抽吸导管或探针的近端施加真空来完全或部分地提取血液和凝块,以用于凝块提取的目的。
4、具体实施方式提供了一种与真空源和抽吸导管一起使用的真空抽吸控制系统。该系统包括柔性连接管道、开关阀、感测单元和控制器。连接管道在不受约束的构造中是线性的并且被构造成将真空源连接到抽吸导管中的抽吸管腔。开关阀被配置成操作性地连接到连接管道,并且感测单元被配置成确定连接管道内的流速并产生表示这种流量的信号,通常为不受限制的流动、受限制的流动或堵塞。控制器被连接以接收表示通过连接管道的流动的信号,并响应于该信号而打开和关闭一个或更多个开关阀。在一个具体实施方式中,当信号指示不受限制的流动时,例如,主要健康的血液或没有阻塞血管的凝块的血液流过连接管道,和/或导管基本上不与凝块或其他闭塞物质接触,控制器被配置成自动关闭开关阀以停止通过连接管道的流动。在另一具体实施方式中,控制器被配置成当信号指示堵塞时启动脉冲抽吸,堵塞可能是由导管或连接管道中或附近的一些闭塞物质引起的。
5、控制器通常还被配置成以预定间隔自动打开开关阀以通过连接管道对流出物材料进行采样,并且阀通常仅在信号指示返回到凝块时才保持打开。控制器算法能够解读健康血液和凝块之间的差异,与抽吸源和所附导管的内径无关。
6、感测单元可以包括多种传感器中的任何一个或更多个传感器,包括:差压传感器、声学(包括超声波)流量传感器、光流传感器、热流传感器、磁流传感器传感器、检测连接管道的周向膨胀的传感器等。虽然下面更详细地描述压差,但是应当理解,能够检测通过连接管道的流量或提取速率何时过量和/或堵塞的任何感测单元将适合在具体实施方式中使用。
7、在示例性实施方式中,感测单元包括沿着连接管道位于间隔开的位置处的成对的压力传感器,以测量压差。控制器可基于压差计算流量,并据此确定所计算的流量是否指示不受限制的流动、受限制的流动或堵塞。
8、在另一个实施方式中,感测单元使用测量光的透射、吸收或两者的光学传感器来表征流经连接管道的内容物。在具体实施方式中,使用可见光来确定流是否包含凝块或主要无凝块。通常,带有凝块的流颜色较深,可以通过光学传感器检测到。替代性地,光学传感器可以使用红外线、紫外线、可见光或一些这样的组合来分析连接管道内的内容物。
9、在其他具体实施方式中,感测单元使用周向膨胀传感器来确定流经连接管道的内容物。连接管道的内部压力和流经其中的内容物影响连接管道的周长。在强真空下,例如在堵塞期间,管道可能会最大限度地收缩。在主要无凝块的血液高速流动期间,管道可能仅轻微收缩。在流动受限制期间,凝块和血液可能会导致连接管道的周长发生相对变化。
10、开关阀还可以采用多种具体形式。通常,无论形式如何,开关阀都将包括致动器,例如螺线管致动器,致动器被供电以打开阀。阀本身可采用多种形式,包括夹管阀、角阀或提供致动的多种其他阀中的任何一种。替代性地,可以提供手动开关阀,手动开关阀允许用户启动和/或终止具体实施方式的功能和特征。
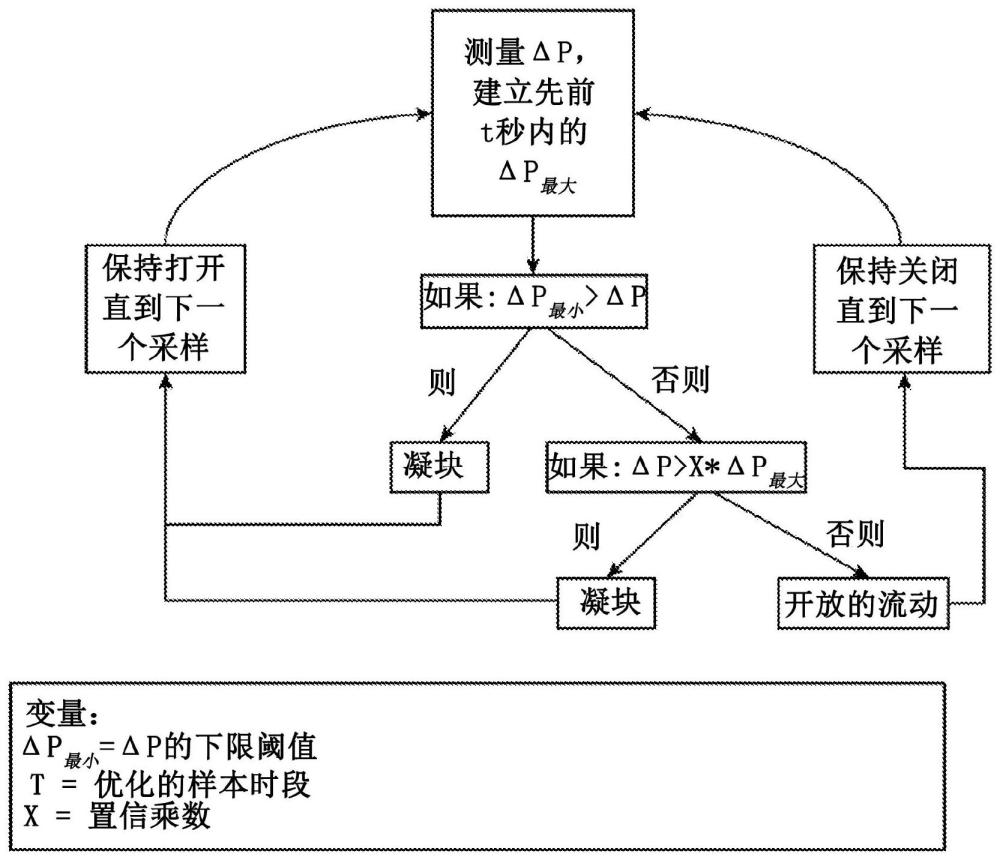
11、在另外的示例性实施方式中,控制器可以被配置成打开阀并保持阀打开直到检测到指示不受限制的流动的流动模式,此时控制器关闭阀。控制器还可以被配置成自动地重新打开开关阀。在具体实施方式中,在可被称为“采样模式”的情况下,控制器还可配置成定期采样或测试流动以重新表征流动并确定重新开始抽吸是否安全。例如,在具体实施方式中,控制器可以通过打开开关阀一段固定时间间隔——在一个实施方式中为150毫秒——来循环性地测试流动,以建立“测试”流动。测试流动被表征,如果有这样的指示,开关阀可以重新打开到“治疗”模式以允许继续抽吸治疗。如果系统将流动表征为不受限制,例如过多,则在进行额外的压差采样之前,系统将停留在闭合配置一段固定的时间间隔,在一个实施方式中,一段固定的时间间隔在四分之一秒与两秒之间。
12、然而,在其他实施方式中,控制器可以不被配置成当达到安全条件时自动重新建立流动。例如,在具体实施方式中,控制器可以被配置成允许用户重新定位抽吸导管,并且在重新定位之后手动打开开关阀(通常通过对导致控制器打开开关阀的开关进行致动)来恢复抽吸治疗。然而,在这种情况下,控制器可以立即返回到“采样模式”,并且如果重新建立的流动被表征为不受限制的流动,则控制器将再次关闭开关阀,并且用户可以再次将抽吸导管重新定位在采样模式中,以接合凝块并手动恢复抽吸。此类系统通常会提供手动开关,手动开关允许用户手动打开开关阀。
13、控制器可以被配置成控制两个或更多个阀。在具体实施方式中,控制器对抽吸导管与真空源之间的第一开关阀以及抽吸导管与具有至少高于真空源的压力的压力源之间的第二开关阀进行控制。控制器可以交替打开第一开关阀和第二开关阀,以在抽吸导管或邻近这种导管的管道内产生压力变化。当第一个开关阀打开时,控制器可以对流动进行采样以确定附接的导管是否仍位于凝块中或以其他方式闭塞。如果没有检测到堵塞或闭塞,控制器可以保持第一开关阀打开并且第二开关阀关闭。
14、在具体实施方式中,真空抽吸系统包括基部单元,该基部单元结合有至少一个开关阀和控制器。基部单元通常被配置成直接安装在真空泵或控制台上或附近,并且通常包括连接电缆,以便从真空控制台或线路接收电力并且可选地与控制器和真空控制台交换信息。连接管通常具有构造成连接真空源的近端和构造成连接到抽吸导管的远端。在这种情况下,真空抽吸系统通常还包括外部单元,该外部单元被配置成在连接管道的远端和近端之间的位置处固定至连接管道。示例性外部单元包括感测单元的至少一部分。例如,在具体实施方式中,感测单元可以包括基部单元中的第一压力传感器和外部单元中的第二压力传感器。在这些情况下,控制器通常被配置成基于来自第一压力传感器和第二压力传感器的信号来确定是否存在压差。
15、在第二方面,具体实施方式提供了一种真空抽吸方法。真空抽吸方法包括将抽吸导管的远端接合在血管中的闭塞物上。使用通过连接管道联接至抽吸管腔的近端的真空源通过抽吸导管的抽吸管腔施加真空。以这种方式,凝块和其他闭塞物质的部分可以通过连接管道被吸入抽吸管腔中,并且被真空源吸入到收集容器中。感测通过连接管道的流动,并且当感测到的流动超过确定值而真空源保持开启时,阀自动关闭以停止通过连接管道的流动。随后将通过打开阀来重新建立通过连接管道的流动,并且重复这些步骤直到吸出所需量的凝块。
16、在第三方面,具体实施方式提供了一种用于产生压差的组件,压差可以导致压力脉冲以执行提取循环。该组件可以包括流体注射设备、机械位移设备、重力引起的压力头、或其组合。流体注射装置可以为当前或之前处于真空抽吸下的导管提供相对正压源。例如,流体可以处于高于真空抽吸系统的压力、在全真空压力与环境压力之间的压力、处于环境压力、在环境压力与收缩压力之间的压力、处于收缩压,或高于收缩压的压力。流体注射设备可以利用孔口、阀、泵、压力室或一些这样的组合。机械位移设备可以物理地对导管系统的体积进行位移,以根据位移的方向提供压力的相对增大和减小。在具体实施方式中,机械位移组件在导管的压力增加到高于真空源的压力之后协助真空恢复。
17、在具体实施方式中,控制器可以包括用于解释压力传感器信号以确定流经导管的内容物是否应被表征为不受限制、受限制或堵塞的算法。一般而言,不受限制的流动是高流动,高流动特征可能是过量,并且可能主要或完全由健康血液、无凝块的血液或无利于抽吸的血管阻塞凝块的血液组成,受限制的流动可以包括健康血液和凝块或其他闭塞物质的混合物,并且堵塞可能是由抽吸导管内、部分抽吸导管内、邻近抽吸导管或附接到抽吸导管的其他连接管道中的凝块或其他闭塞物质引起的。在一些实例中,健康血液可以是具有足够低比例的交联纤维蛋白的血液,使得其没有充分整合以引起局部缺血或其他类似的血管闭塞。当算法检测到不受限制的流动时,可能会导致系统启动采样模式。当算法检测到流动受限制时,可能会导致系统启用全真空抽吸。当算法检测到堵塞时,可能会导致系统在提取循环中生成各种压力脉冲。该算法可以响应并适应不断变化的环境例,例如在手术过程中更换不同尺寸的导管。如果导管状态保持静态、变化太快、变化太慢或如预期改善,则算法可以调整采样模式和压力脉冲幅度。
18、在该方法的具体方面,具体实施方式可以从包括静脉或动脉的血管去除凝块和其他闭塞物质。流动的感测可以包括差压测量、声学流量测量、光流测量、热流量测量、连接管道的周向膨胀测量等中的一项或更多项。
19、在该方法的优选方面,感测流量包括使用位于真空源附近的第一传感器和位于真空源与抽吸导管之间的连接管道上或附近的第二传感器来测量压差。
20、在该方法的又一实施方式中,恢复通过连接管道的流动包括将阀打开达亚秒间隔,检测何时感测到的流动被表征为可接受的,并且自动恢复流动。自动恢复流动通常包括自动检测感测到的流动何时可以被表征为可接受的,并且只要流动被如此表征,阀就保持打开。替代性地,恢复流动可以包括手动打开开关阀。
21、在该方法的另外的实施方式中,通过关闭真空泵的阀、打开压力源的阀来产生压差,其中压力至少高于真空压力,然后重新打开到真空泵的阀。替代地或组合地,压差由机械位移产生,其中室的容积减小以增加导管内的压力,并且室的容积增加以减小导管内的压力,由此机械位移室的致动产生压差。压差可以被定制为具有特定的或动态的幅度和频率,特定的或动态的幅度和频率有利于凝块或其他闭塞物质的去除。
22、在具体实施方式中,关于动态系统状态检测,控制器可以通过操作真空阀,例如通过选择性地打开和关闭真空阀,在连接管道中产生压力水平变化。在第二步骤中,控制器可以使用远侧压力传感器检测压力水平,其中检测到的压力水平的变化与生成的压力水平变化相关。在第三步骤中,控制器可以基于检测到的压力水平变化来确定抽吸导管或连接管道中的一个或更多个系统状态。在第四步骤中,控制器可以操作真空阀以基于一个或更多个确定的系统状态采取行动。
23、在具体实施方式中,系统状态可以包括抽吸导管和/或连接管道内的流动状态。在具体实施方式中,流动状态可以包括开放流动状态、闭塞流动状态和/或部分闭塞流动状态。在具体方面,系统状态可以包括抽吸导管和/或连接管道中特定流体的存在。
24、在具体实施方式中,控制器可以被配置成基于动态系统状态检测来检测系统中盐水液体的存在,例如用于灌注、冲洗或重新灌注系统,或者检测脉冲期间盐水的损失。在具体实施方式中,控制器可以被配置成基于动态系统状态检测来检测系统中气体(例如气泡)的存在。在具体实施方式中,控制器可以被配置成基于动态系统状态检测来检测附接至系统的导管的不存在。在具体实施方式中,控制器可以被配置成基于动态系统状态检测来检测凝块与导管端头的接合。
25、在具体实施方式中,动态系统状态检测可以单独地或附加地使用除真空阀之外的压力源和/或阀。在具体实施方式中,系统可以使用真空阀、压力阀(例如盐水排气阀)和/或多个其他压力阀。
26、该动态系统状态检测方法的具体实施方式可以单独地或附加地使用除远侧压力传感器之外的传感器。在具体实施方式中,系统可以使用与连接管道和/或抽吸导管相关联的一个或更多个压力传感器,以及其他压力传感器,例如真空压力传感器和盐水压力传感器。在具体实施方式中使用的传感器可以不限于压力传感器。在一些实施方式中,可以使用多种传感器,例如,以用于检测压力、声波能量、超声波能量和/或流速。
27、在具体实施方式中,可以确定一个或更多个系统分数来确定系统状态,其中每个系统分数独立地或与其他系统分数组合地可以指示抽吸导管或连接管道中的特定系统状态的可能性。在这方面,系统分数可以充当用于量化特定系统状态的相应可能性的度量。
28、在具体实施方式中,系统分数可以直接或间接从传感器数据(例如压力分布)导出。在具体实施方式中,系统分数确定可以基于从检测到的压力分布自动识别特定特征、基于从那些特定特征导出的值和趋势提取压力参数、以及基于那些特征的压力参数计算一个或更多个系统分数。在具体实施方式中,基于压力参数确定系统分数还可以包括参数的适当加权和/或校正因子的使用。在具体实施方式中,压力参数可以包括起始压力水平、起始压力水平的差、结束压力水平、结束压力水平的差、峰值压力水平和压力水平的变化中的一项或更多项。
29、在具体实施方式中,系统分数可以基于机器学习来确定。在具体实施方式中,训练数据集可以从在广泛的场景中获取的检测到的压力分布数据结合统计变化并且对应于感兴趣的系统状态来组装。然后可以使用经过训练的机器学习模型来预测新情况的系统状态。在具体实施方式中,机器学习算法可以采用半监督和无监督学习。该算法可以采用聚类、降维和强化学习来进一步提高预测准确性。在具体实施方式中,可以采用使用上述算法流分析技术的组合的算法。
30、在具体实施方式中,系统状态分数中的一项或更多项可以基于抽吸导管的一项或更多项几何特性,并且其中抽吸导管的一项或更多项几何特性可以基于检测到的一项或更多项压力水平来确定。在具体实施方式中,系统状态分数中的一项或更多项可以以抽吸式血栓切除系统的一项或更多项周围环境参数为基础。在具体实施方式中,系统状态分数中的一项或更多项可基于与抽吸式血栓切除系统相关联的一项或多项材料参数,并且其中一项或更多项材料参数可基于一项或多项检测到的压力水平来确定。在具体实施方式中,系统状态分数中的一项或更多项可基于与抽吸导管或连接管道中的一个或更多个血栓相关联的一个或更多个血栓参数,其中一个或更多个血栓参数可以基于一个或更多个检测到的压力水平来确定。在具体实施方式中,系统状态分数中的一项或更多项可以基于与抽吸导管或连接管道中的一个或更多个流体相关的一个或更多个流体参数,其中所述一个或更多个流体参数可基于该一个或更多个检测到的压力水平来确定。
31、在具体实施方式中,可以使用升级特征,其中由控制器维护相同系统状态的连续确定的升级计数,并且如果计数超过阈值则可以采取特定动作。在具体实施方式中,可以在阈值交叉迭代之后的迭代中重置计数。在特定方面,如果计数超过阈值则采取的动作可以是生成通知,例如用户通知。在具体实施方式中,如果计数超过阈值则采取的动作可以涉及控制器对一个或更多个阀的操作。
32、本文公开的实施方式仅是示例,并且本公开的范围不限于此。具体实施方式可以包括本文所公开的实施方式的部件、元件、特征、功能、操作或步骤中全部、一些,或不包括任何部件、元件、特征、功能、操作或步骤。根据本发明的实施方式特别公开在针对方法和系统的所附权利要求中,其中在一个权利要求类别例如方法中提到的任何特征也可以在另一个权利要求类别例如系统中要求保护。仅出于形式原因选择所附权利要求中的相关性或参考。然而,任何因故意引用任何先前权利要求(特别是多引多)而产生的主题都可以被要求保护,使得公开了权利要求及其特征的任何组合并且可以要求保护,而不管所附权利要求中选择的从属关系如何。可以要求保护的主题不仅包括所附权利要求中阐述的特征的组合,还包括权利要求中的特征的任何其他组合,其中权利要求中提到的每个特征可以与任何其他特征或权利要求中的其他特征的组合相组合。此外,本文描述或描绘的任何实施方式和特征可以在单独的权利要求中要求保护和/或与本文描述或描绘的任何实施方式或特征或与所附权利要求的任何特征的任意组合中要求保护。
- 还没有人留言评论。精彩留言会获得点赞!